SLAMBench
IntroductionDownload SLAMBench 1.1 (March 2015)
Computer vision algorithms for 3D scene understanding have enormous potential impacts for power constrained robotics application contexts. SLAMBench presents a foundation for quantitative, comparable and validatable experimental research to investigate trade-offs for performance, accuracy and energy consumption of an application that produces a dense 3D model of an arbitrary scene using an RGB-D camera.
Dense approaches to the simultaneous localisation and mapping (SLAM) problem are computationally expensive compared to sparse feature-based methods, but have important advantages in providing robust localisation and a highly-detailed model of the environment. SLAMBench is a software framework that supports research in hardware accelerators and software tools by comparison of performance, energy-consumption, and accuracy of the generated 3D model in the context of a known ground truth.
Watch a video introducing SLAMBench: video.
Features
SLAMBench provides implementations of kfusion using popular languages, currently CUDA, OpenCL, OpenMP and C++. Input sequences can be provided in a number of standard formats, including OpenNI, or directly from an OpenNI compatible camera. The tool allows various parameters to be easily adjusted to trade off accuracy against performance, or power. Accuracy can be measured using scripts provided in association with the ICL-NUIM dataset, which provide high quality synthetically generated sequences as ground truth references.
The structure of the code base allows for alternative kernels or algorithms to be plugged in with relative ease and, again, the effect on performance and accuracy to be easily analysed.
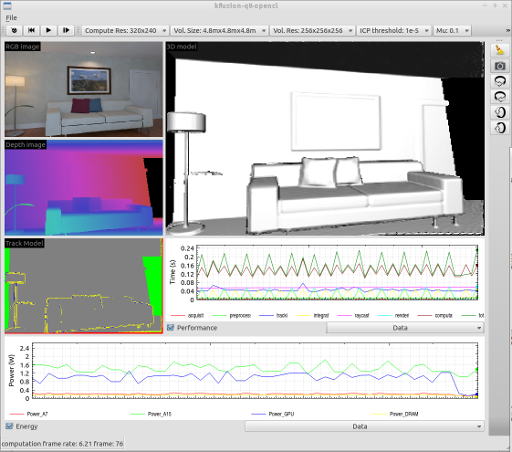
The Qt based interface allows real time visualisation of performance figures, including power on ODROID-XUE/3, as well as visualisation of the 3D model as it is constructed.
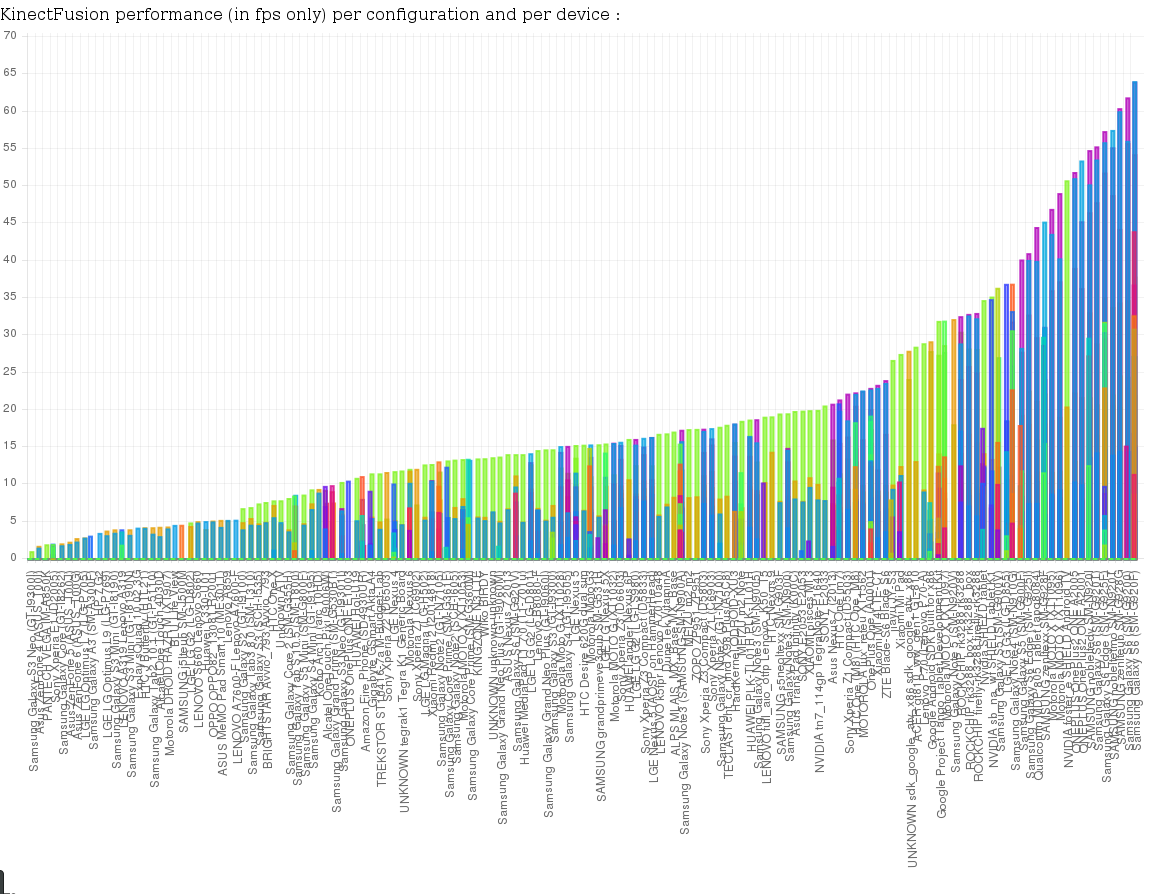
SLAMBench for Android
SLAMBench is also available as an Android application on Google Play.
This application provides us insights of the effect of platforms on the performance of SLAMBench. following an example of the data we collect so far.
Publications
See Publications for further information.
If you use SLAMBench in scientific publications, we would appreciate citations to the following paper (http://arxiv.org/abs/1410.2167):
Introducing SLAMBench, a performance and accuracy benchmarking methodology for SLAM.
L. Nardi, B. Bodin, M. Z. Zia, J. Mawer, A. Nisbet, P. H. J. Kelly, A. J. Davison, M. Luján, M. F. P. O'Boyle, G. Riley, N. Topham, and S. Furber.
Introducing SLAMBench, a performance and accuracy benchmarking methodology for SLAM.
In IEEE Intl. Conf. on Robotics and Automation (ICRA), May 2015. arXiv:1410.2167.
Bibtex entry:
@inproceedings{SLAMBench2015, author={Nardi, Luigi and Bodin, Bruno and Zia, M. Zeeshan and Mawer, John and Nisbet, Andy and Kelly, Paul H. J. and Davison, Andrew J. and Luj\'an, Mikel and O'Boyle, Michael F. P. and Riley, Graham and Topham, Nigel and Furber, Steve}, title = "{Introducing SLAMBench, a performance and accuracy benchmarking methodology for SLAM}", booktitle = "{IEEE Intl. Conf. on Robotics and Automation (ICRA)}", year = {2015}, month = {May}, NOTE = {arXiv:1410.2167} }
Downloads
SLAMBench is available as a free download under an open source license. Whilst we do not require registration to download we would appreciate if you could complete the form as it enables us to help assess our impact, which is a key metric for our projects funding. If you do register we will send you an email when we open our repository and when there are major developments to the tool.
If you publish work based on, or using, SLAMBench, we would appreciate citations to the ICRA paper given above.
If you have any support queries or ideas then please contact us by email