PAMELA - Tools and Downloads
Over the course of the project we expect to deliver a number of tools to assist in related research. These tools will be added to this page as they are released.
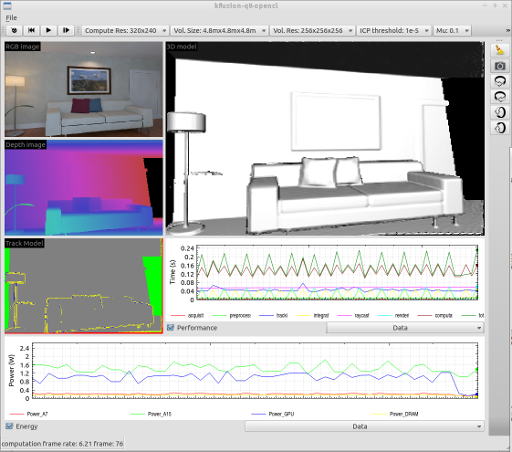
SLAMBench is an open source tool designed to assist in the development of simultaneous localisation and mapping (SLAM) algorithms, and evaluation of
platforms for implementing those algorithms. It runs on the Linux operating system, and has been used on X86 and ARM along with various GPUs, from high end to mobile.
Its core currently consists of:
 SLAMBench Download SLAMBench
SLAMBench Download SLAMBench
SLAMBench is an open source tool designed to assist in the development of simultaneous localisation and mapping (SLAM) algorithms, and evaluation of
platforms for implementing those algorithms. It runs on the Linux operating system, and has been used on X86 and ARM along with various GPUs, from high end to mobile.
Its core currently consists of:
- Implementations of Kfusion using CUDA, OpenCL, OpenMP or C++
- Support for accuracy measurements using the ICL-NUIM dataset
- Kernel and process benchmarking support
- Integrated visualisation tool to monitor performance of algorithmc phases, and on some platforms power